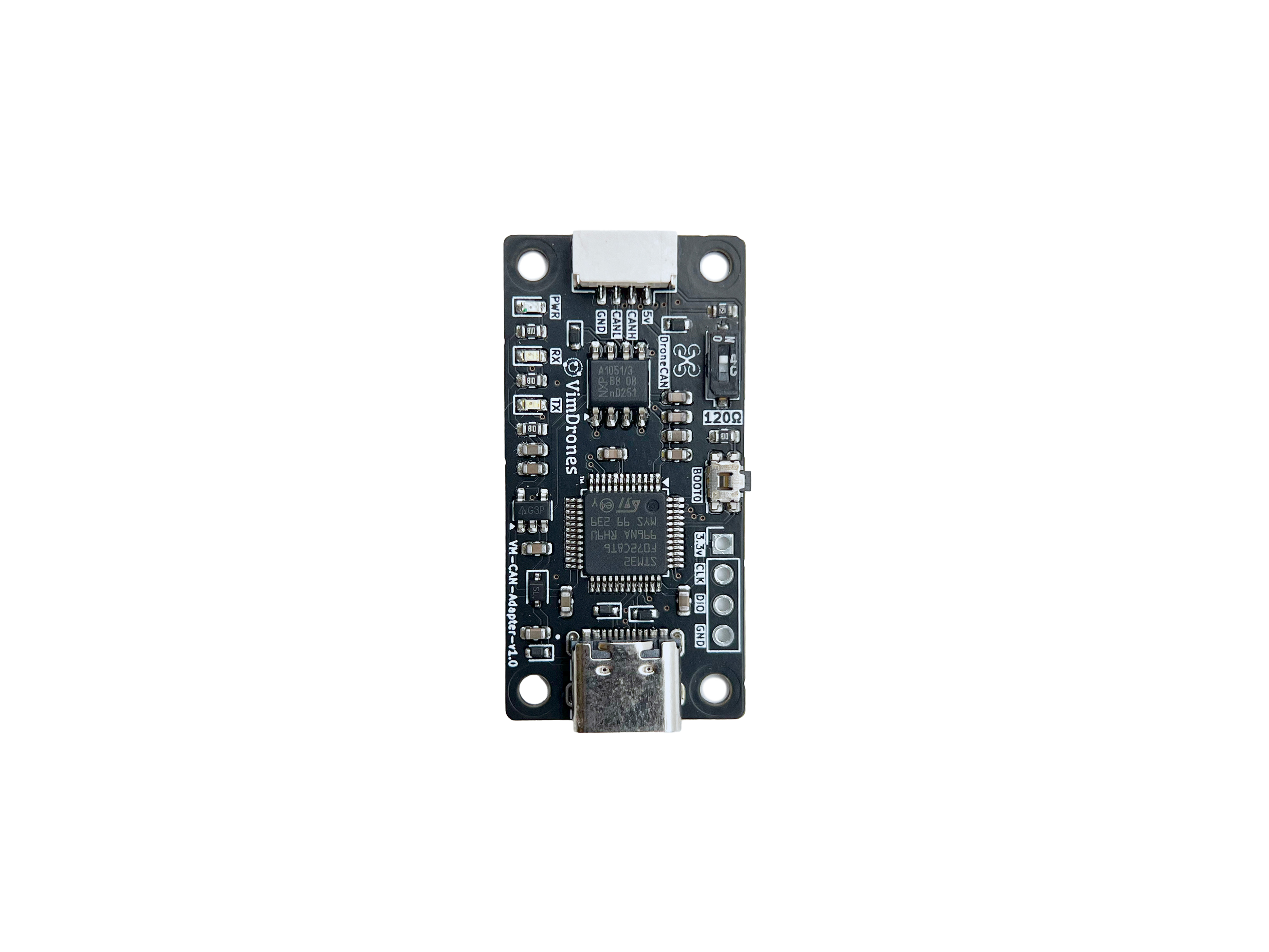
Vimdrones DroneCAN Adapter
Specification
| Parameter | Value |
|---|---|
| Power Supply | 5V |
| Software Interface | MAVCAN SocketCAN SLCAN |
| CAN Ports | 1 |
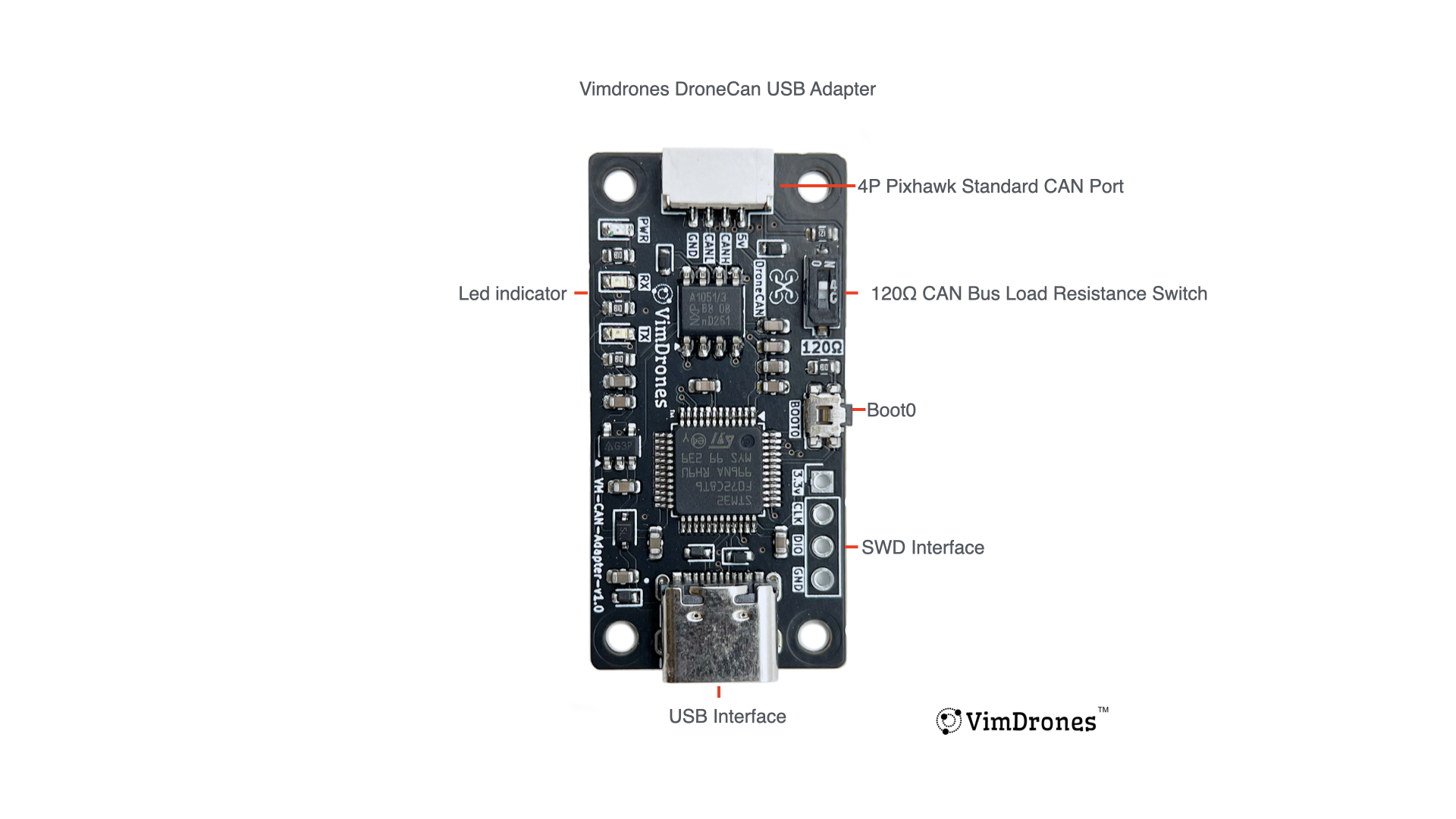
| CAN Termination | 120Ω with Mechanical switch, default OFF |
| CAN Port Connector | Pixhawk Standard 4P CAN Port |
| Board Outline | 40mm × 20mm |
| Board Thickness | 1.2mm |
| Mount Hole | 4 * M2.5 (35mm × 15mm) |
| 3D Model | STL | STEP |
Firmware
-
MAVCAN Bridge (New Feature)
With MAVCAN Bridge the adapter shows up as a serial device, bridging MAVLink and CAN frames from USB and CAN bus. macOS, Linux, and Windows are all supported. -
candleLight_fw (Stock Firmware)
With candleLight_fw the adapter shows up as a native CAN interface. Only Linux with the socketcan module is supported (excludes WSL default Ubuntu distro). -
canable-fw
With canable-fw the adapter shows up as a serial interface; use theslcancommand to bring it up as a CAN interface. macOS, Linux, and Windows are all supported.
Pinout
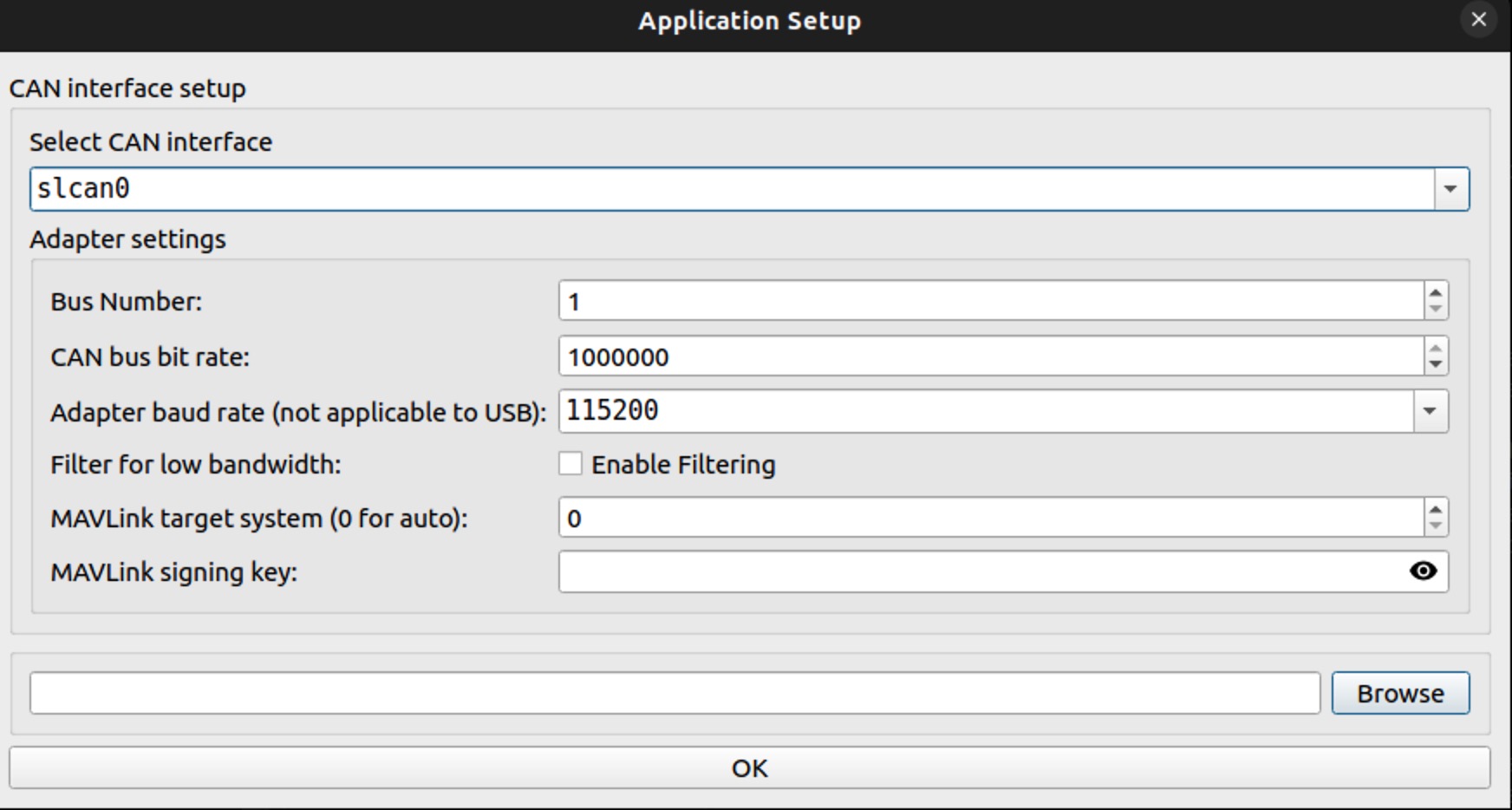
Getting Started
Interface Setup
Linux
-
candleLight_fw (stock firmware)
- Compile and flash from source
git clone https://github.com/VimDrones/candleLight_fw.git cd candleLight_fw # Enter DFU mode: press boot button then connect USB cable make flash-CANable_VIMDRONES_fw - Setup
sudo ip link set can0 up type can bitrate 1000000 candump can0 # monitor CAN messages
- Compile and flash from source
-
canable-fw
- Compile and flash from source
git clone https://github.com/VimDrones/canable-fw.git cd canable-fw make # Enter DFU mode: press boot button then connect USB cable make flash - Setup
ls /dev/ttyACM* # -s0=10k -s1=20k -s2=50k -s3=100k # -s4=125k -s5=250k -s6=500k -s7=750k -s8=1M sudo slcand -o -c -s8 /dev/ttyACM0 slcan0 # adjust port as needed sudo ifconfig slcan0 up candump slcan0 # monitor CAN messages
- Compile and flash from source
DroneCAN Web Tool
- Open can.vimdrones.com (MAVCAN Bridge firmware only)
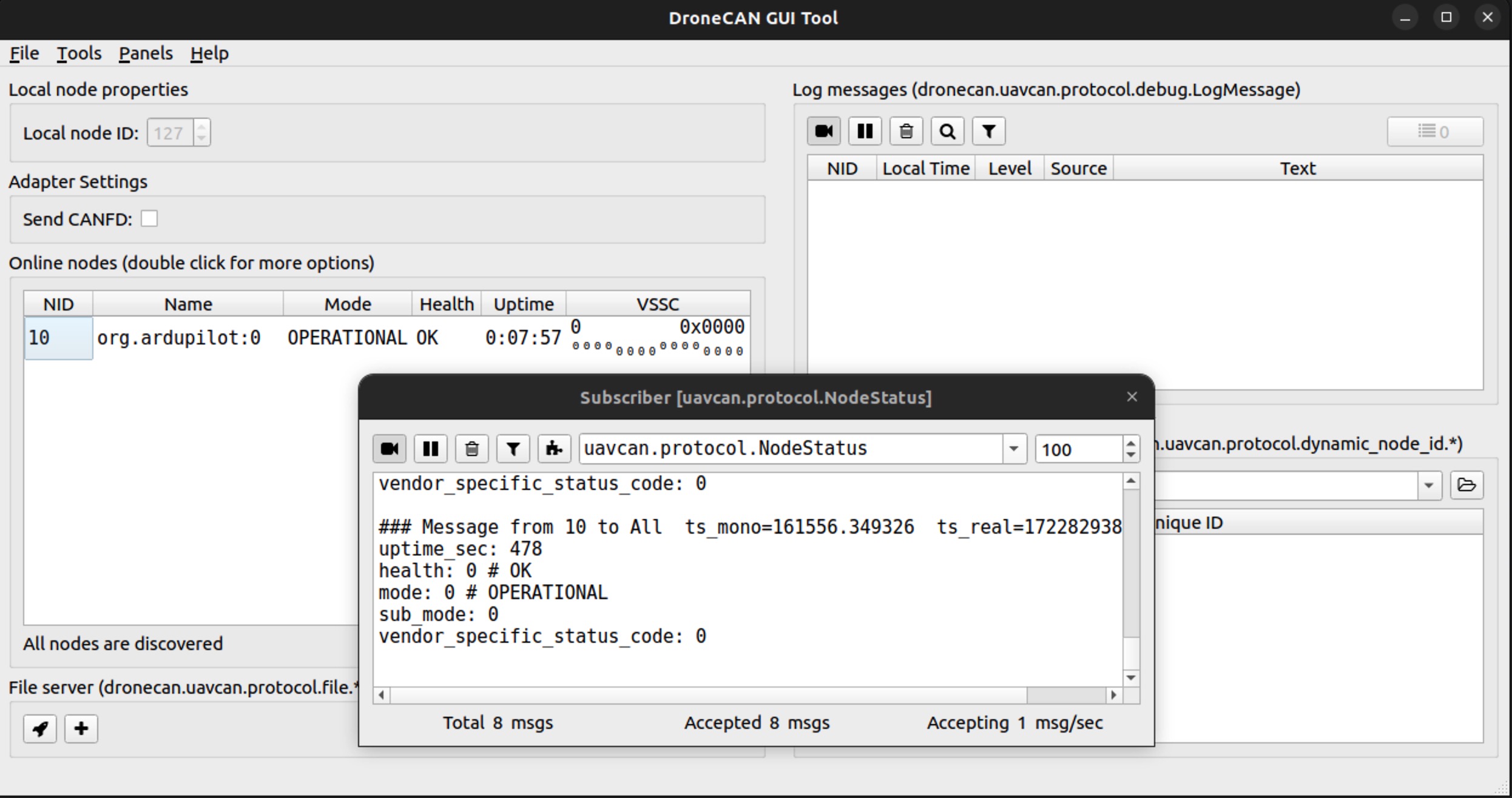
DroneCAN GUI Tool
- Install DroneCAN GUI Tool
- Select interface (
can0for candleLight_fw,slcan0for canable-fw)
- Monitor DroneCAN Node Status — Pixhawk4 (ArduPilot firmware) connected