AM32 DroneCAN Control over ArduPilot SITL
Video Tutorial
Wiring
- Diagram
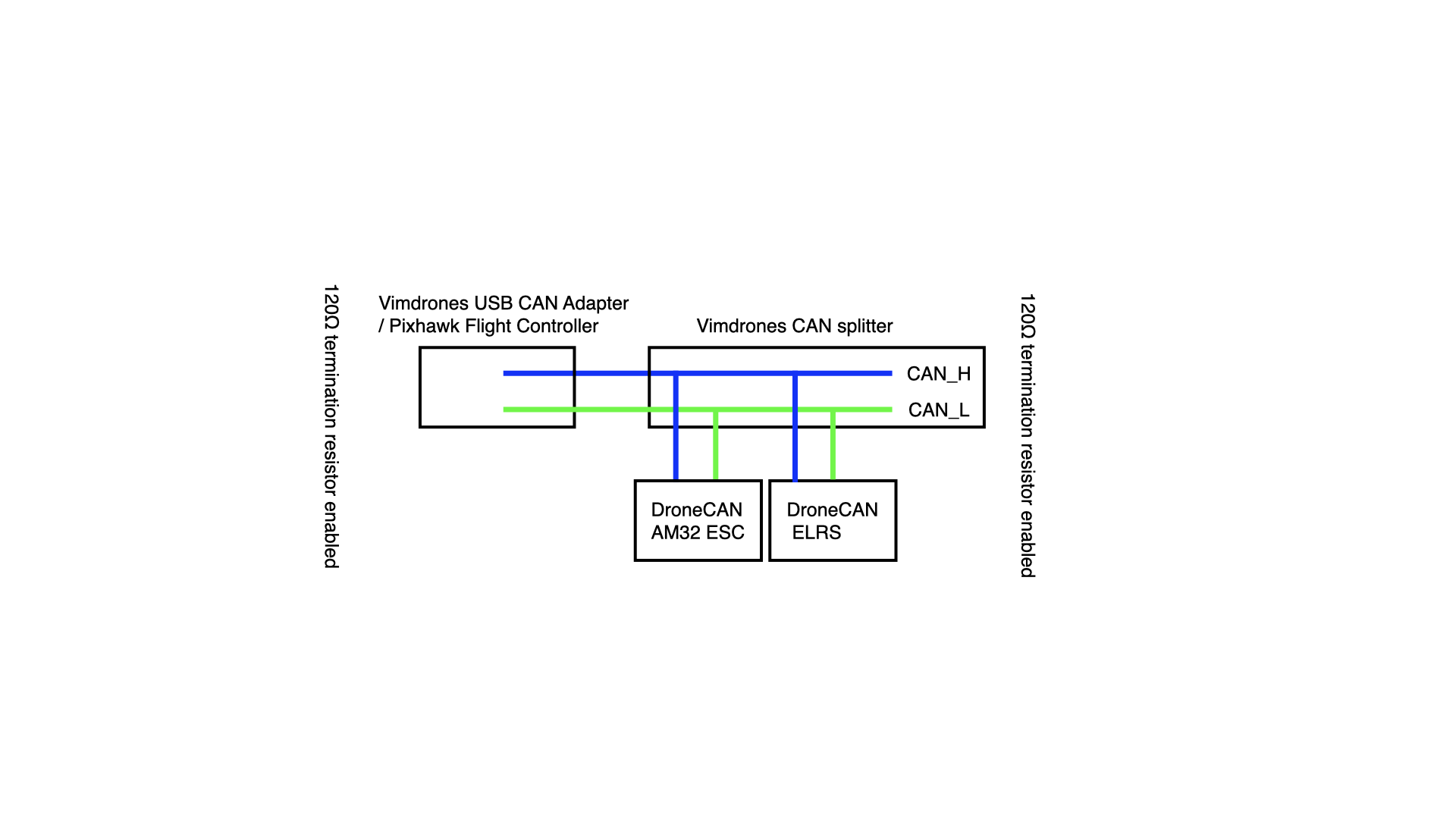
- Example
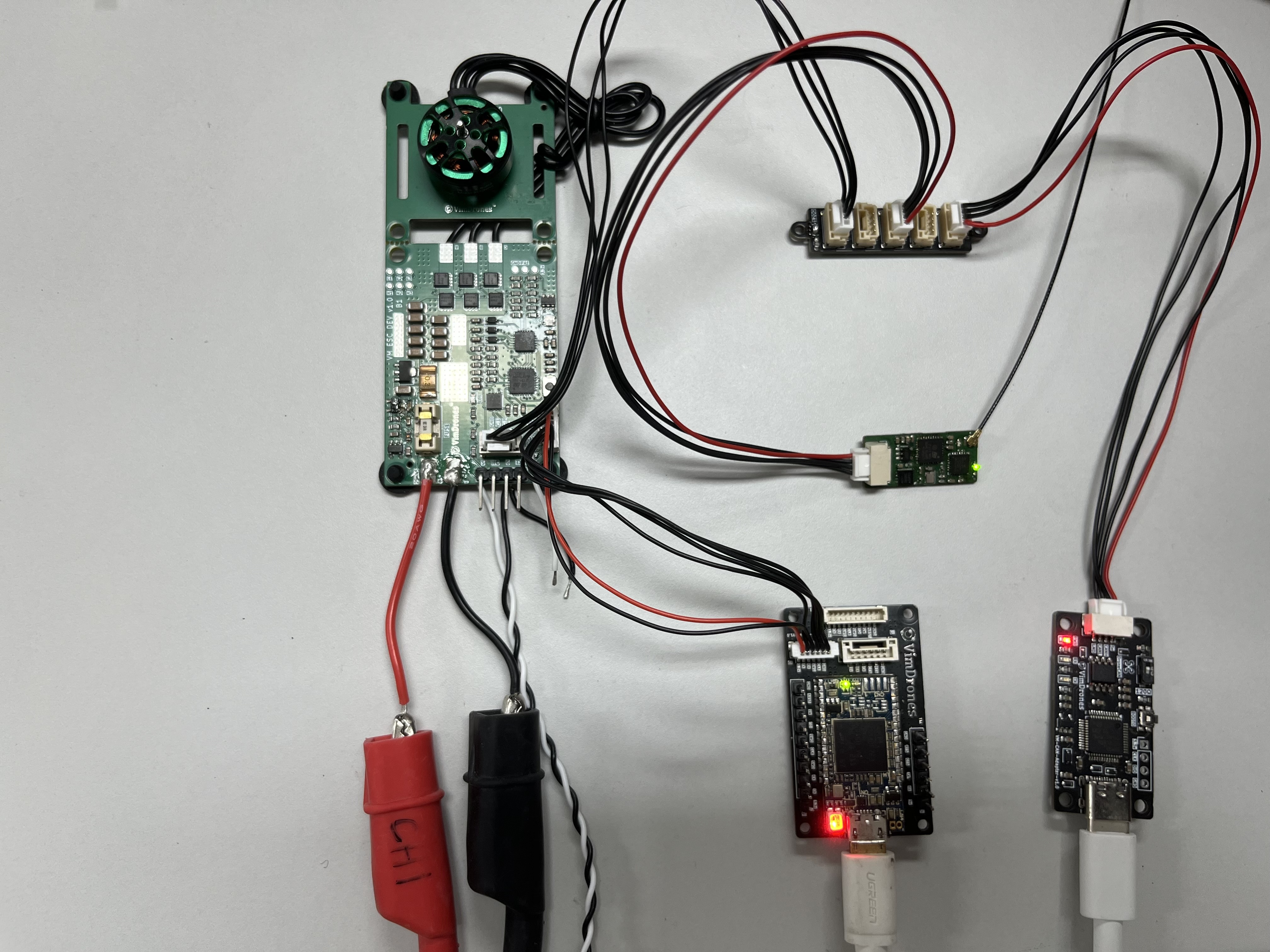
- Hardware List
- Vimdrones ESC DEV
- Vimdrones STLINK V3
- Vimdrones CAN Adapter
- Vimdrones CAN Splitter
Setup Native CAN Interface
ifconfig -a
sudo ip link set can0 up type can bitrate 1000000
Build ArduPlane from Source
git clone https://github.com/ArduPilot/ardupilot
cd ardupilot
#build environment setup cloud take sometime, we skip in here, please visit https://ardupilot.org/dev/docs/building-the-code.html
./Tools/autotest/sim_vehicle.py -v ArduPlane --console --map --can-peripherals
Set ArduPilot Params
CAN_P1_DRIVER 1.0 # First driver
CAN_D1_UC_ESC_BM 15 # ESC 1,2,3,4
Bridge CAN Interfaces
cd ardupilot
./modules/DroneCAN/pydronecan/tools/dronecan_bridge.py mcast:0 can0
Set RC Control (Optional)
Control Your SITL ArduPlane
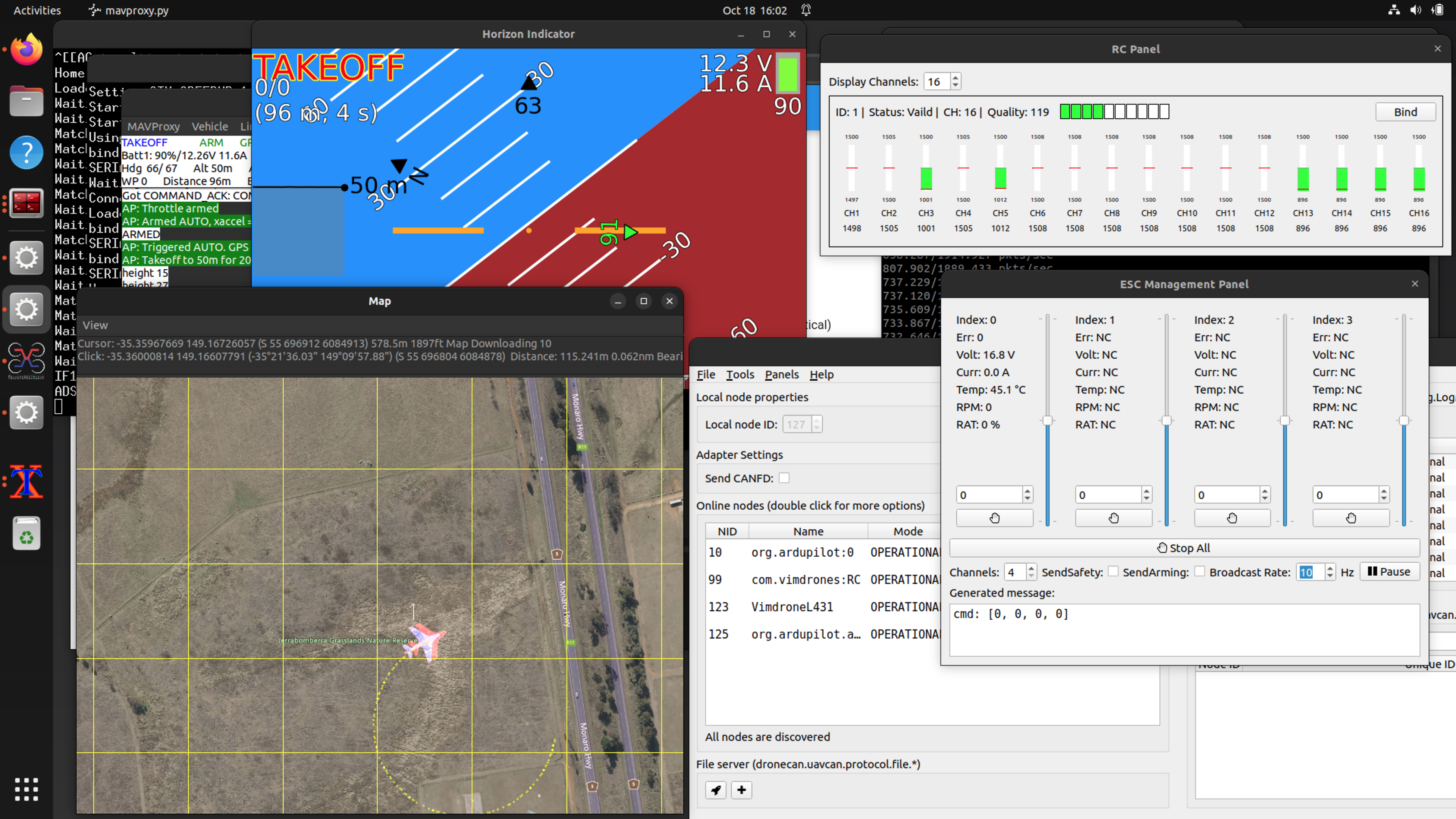 using any GCS or input command in Mavproxy
using any GCS or input command in Mavproxy
#ie.
mode TAKEOFF
arm throttle