ArduPilot Debug Setup
Video Tutorial
Hardware Requirements
- Debug Probe
- Vimdrones STLinkV3 Probe - Purchase Link
- Optical:
- any stlink v2, v3
- Device
- Pixhawk4
- SH1.00mm 6P/10P Pixhawk Standard Cable (Device has Pixhawk Standard Port Only)
- Optical:
- any ardupilot flight controller with SWD interface
- any AP_Periph device with SWD interface
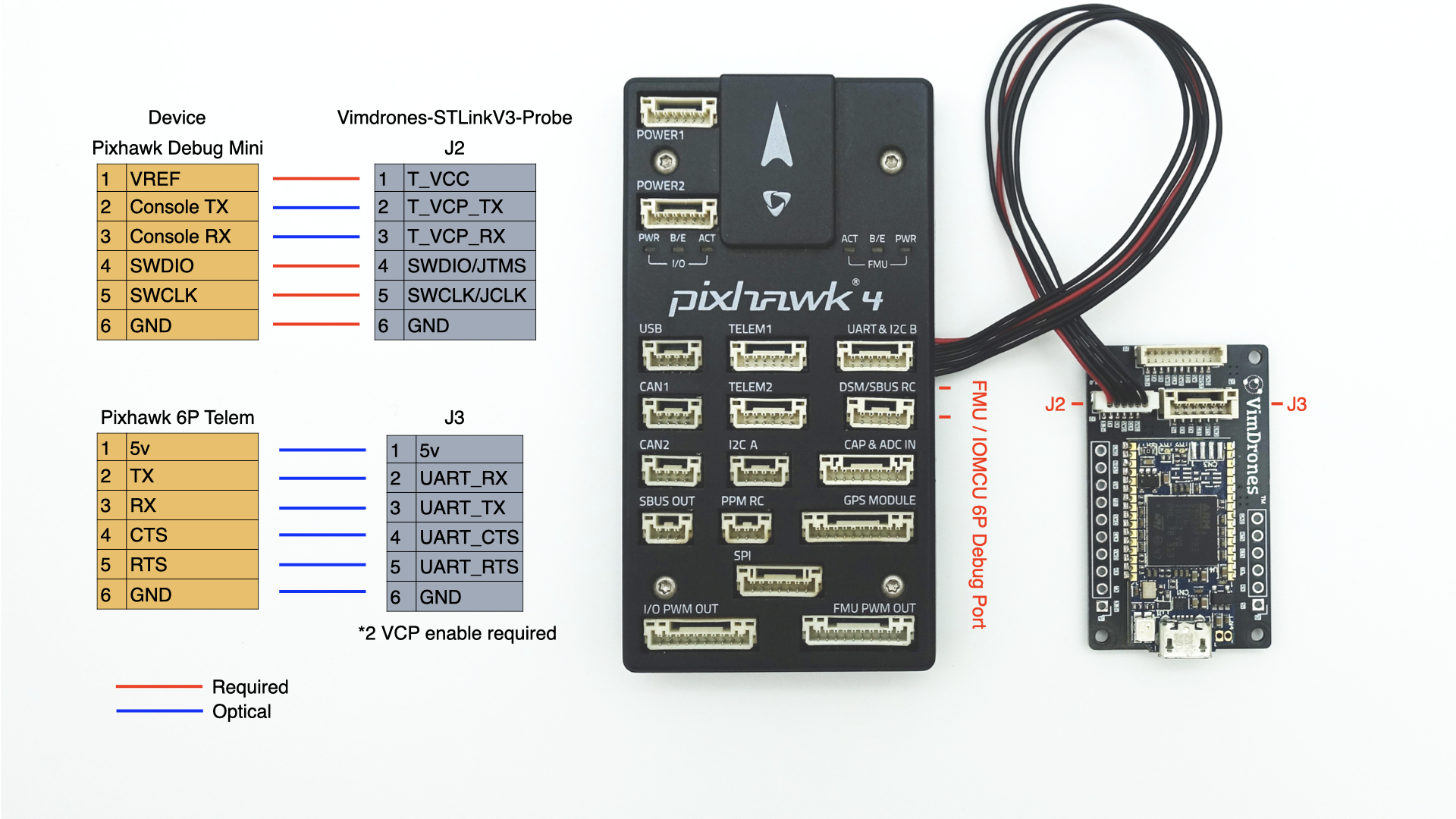
Wiring Diagram
Software Requirements
Build ArduPilot Firmware
In Terminal - Clone ardupilot project
git clone --recurse-submodules https://github.com/ArduPilot/ardupilot.git
cd ardupilot
-
Setup OS Dependency
-
Firmware Build
./waf configure --board Pixhawk4 ./waf copter #change target type here, ie plane, rover #check build result ➜ ardupilot git:(Copter-4.5.1) file build/Pixhawk4/bin/* build/Pixhawk4/bin/arducopter: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), statically linked, with debug_info, not stripped build/Pixhawk4/bin/arducopter.apj: ASCII text, with very long lines (65435) build/Pixhawk4/bin/arducopter.bin: TTComp archive data, binary, 4K dictionary build/Pixhawk4/bin/arducopter_with_bl.hex: ASCII text - Bootloader Build
./waf configure --board Pixhawk4 --bootloader ./waf bootloader #check build result ➜ ardupilot git:(Copter-4.5.1) file build/Pixhawk4/bootloader/* build/Pixhawk4/bootloader/AP_Bootloader: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), statically linked, with debug_info, not stripped ➜ ardupilot git:(Copter-4.5.1) file build/Pixhawk4/bin/AP_Bootloader.* build/Pixhawk4/bin/AP_Bootloader.apj: JSON data build/Pixhawk4/bin/AP_Bootloader.bin: TTComp archive data, binary, 4K dictionary build/Pixhawk4/bin/AP_Bootloader.hex: ASCII text -
Create openocd target specific ie. Pixhawk4.cfg
source [find interface/stlink.cfg] source [find target/stm32f7x.cfg] -
Create vscode launch file .vscode/launch.json
{ "version": "0.2.0", "configurations": [ { "name": "ArduCopter", "cwd": "${workspaceFolder}", "executable": "${workspaceFolder}/build/Pixhawk4/bin/arducopter", "liveWatch": { "enabled": true, "samplesPerSecond": 4 }, "request": "launch", "type": "cortex-debug", "servertype": "openocd", "configFiles": [ "${workspaceFolder}/Pixhawk4.cfg", ] }, { "name": "AP_Bootloader", "cwd": "${workspaceFolder}", "executable": "${workspaceFolder}/build/Pixhawk4/bootloader/AP_Bootloader", "livewatch": { "enabled": true, "samplespersecond": 4 }, "request": "launch", "type": "cortex-debug", "servertype": "openocd", "configFiles": [ "${workspaceFolder}/Pixhawk4.cfg" ], }, ] }