Vimdrones CAN Servo Hub 4CHP
Specification
| Parameter | Value |
|---|---|
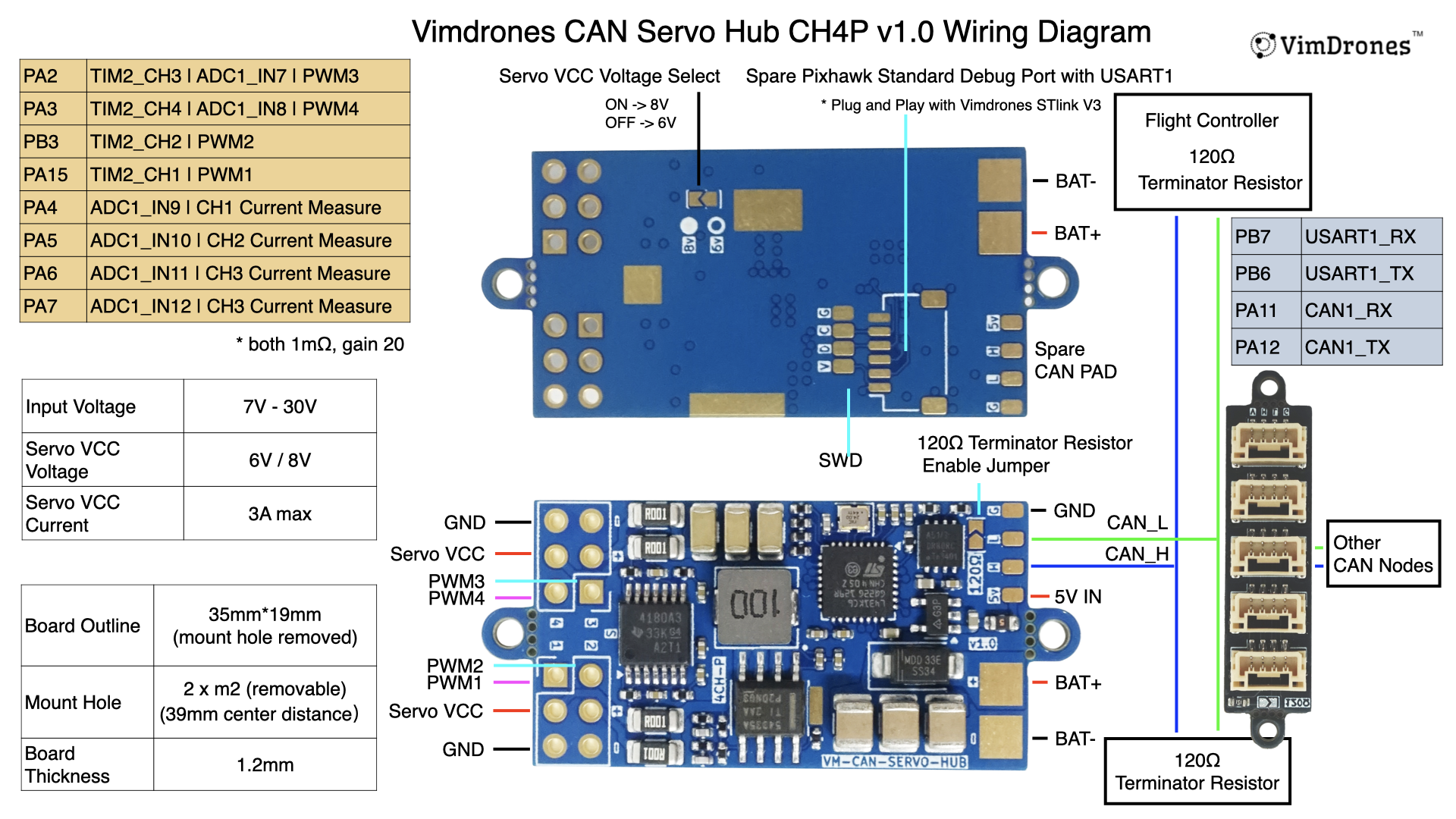
| Input Voltage | 7V – 30V |
| Servo VCC Voltage | 6V / 8V |
| Servo VCC Current | 3A max |
| Firmware | AP_Periph |
| Firmware Target | VM-L431-SRV-Hub-4CHP |
| CAN Ports | 1 |
| CAN Termination | 120Ω with Solder PAD switch, default OFF |
| CAN Port Connector | Solder PAD |
| Board Outline | 35mm × 19mm (mount hole removed) |
| Board Thickness | 1.2mm |
| Mount Hole | 2 * M2 (removable, 39mm center distance) |
| 3D Model | STL | STEP |
Features
- DroneCAN Servo Control —
uavcan.equipment.actuator.Command - 4-channel Servo VCC current measurement
Key Parameters
n = output channel index, starting from 1
| Parameter | Description | Default |
|---|---|---|
OUTn_MIN |
PWM output min pulse width (µs) | 1100 |
OUTn_MAX |
PWM output max pulse width (µs) | 1900 |
OUTn_TRIM |
PWM output center pulse width (µs) | 1500 |
OUTn_REVERSED |
Reverse PWM increase direction | false |
OUTn_FUNCTION |
Maps actuator_id (e.g. 51=id1, 52=id2…) | — |
OUT_RATE |
PWM output frequency (Hz) | 50 |
Wiring